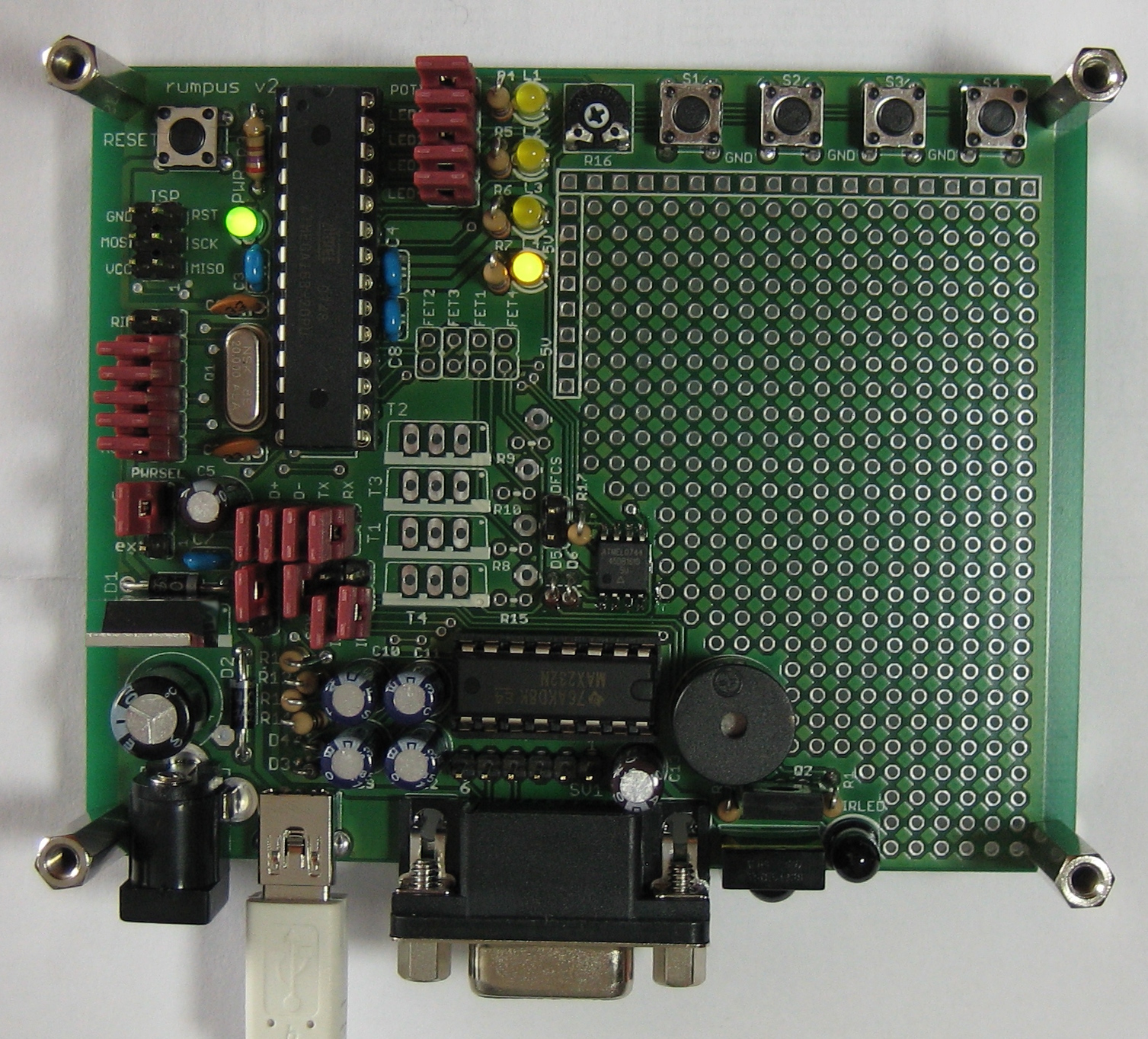
rumpus project page
- short description: Feature rich development board for Atmel ATmega168 (and pin-compatible) controllers with USB
- project state: stable
- begin: August, 2008
- platform: Atmel ATmega168/ATmega328
- availability: Complete construction kit or board only (see Webshop)
Description
This page is only available in German, sorry.